
↳
One vertically-integrated Physical AI system for the maritime world.
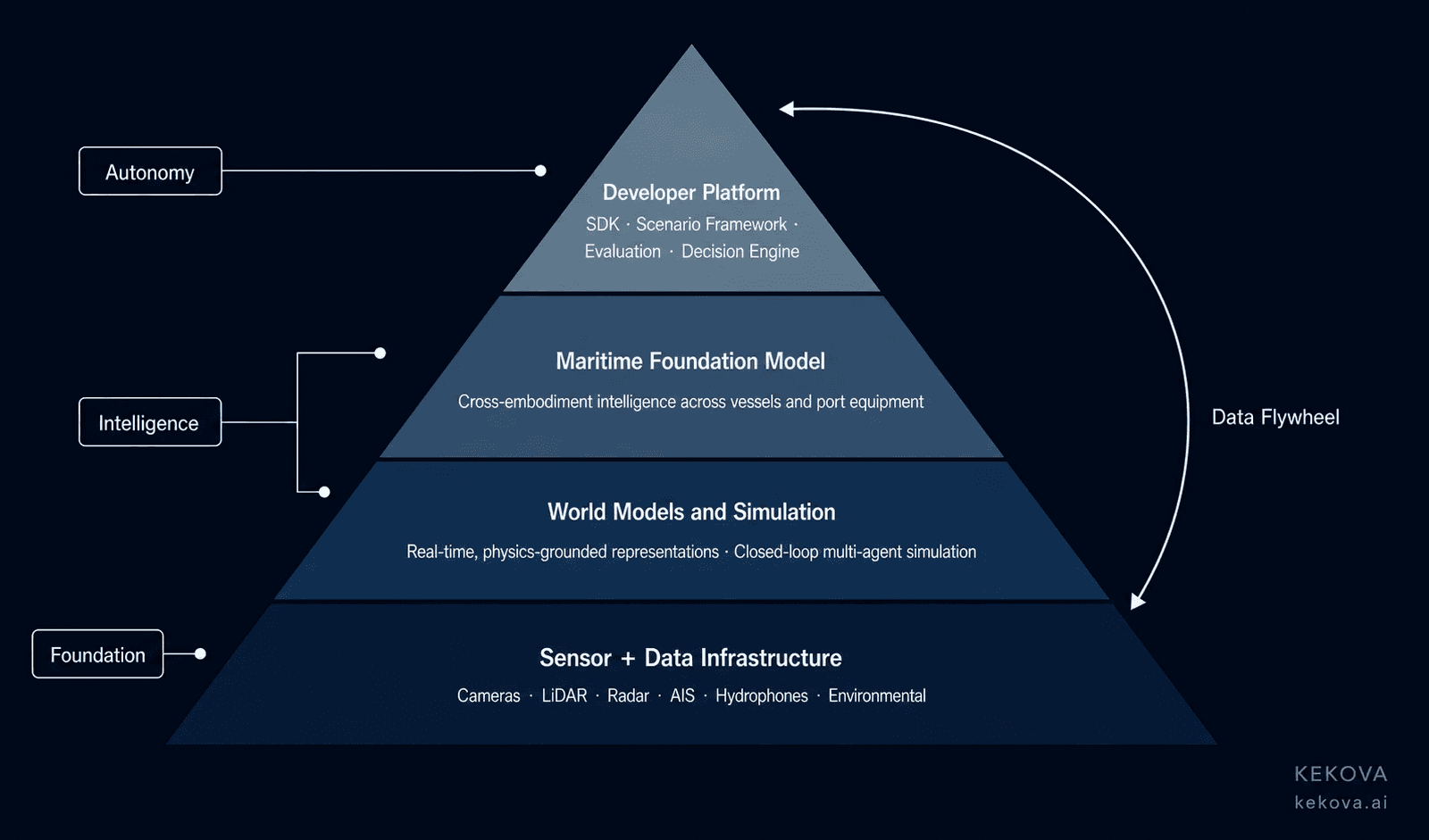
One System, Four Layers
Why vertically integrated?

Layer 1
LAYER 2
Real-time, physics-grounded representations of specific ports and their surrounding waters: vessels, berths, cranes, containers, yard equipment, weather, tides, currents, traffic. Continuously updated from live sensor streams. Built for the operating envelope of maritime environments — wide dynamic range, partial observability, multi-vessel interactions, sea state, regulatory zones. Closed-loop multi-agent simulation runs against the same world models the deployed systems use — no domain gap by design. Together they form the substrate that makes both deployment and validation work.


Layer 3
A multimodal, multi-agent model of the maritime world. Designed for cross-embodiment generalization across vessel classes — container ships, tugs, autonomous surface vessels, harbor craft — port equipment such as cranes, AGVs, and terminal tractors, and coordination surfaces including berth allocation, traffic management, and multi-vessel maneuvering. Grounded in real-world data from every instrumented deployment.
LAYER 4
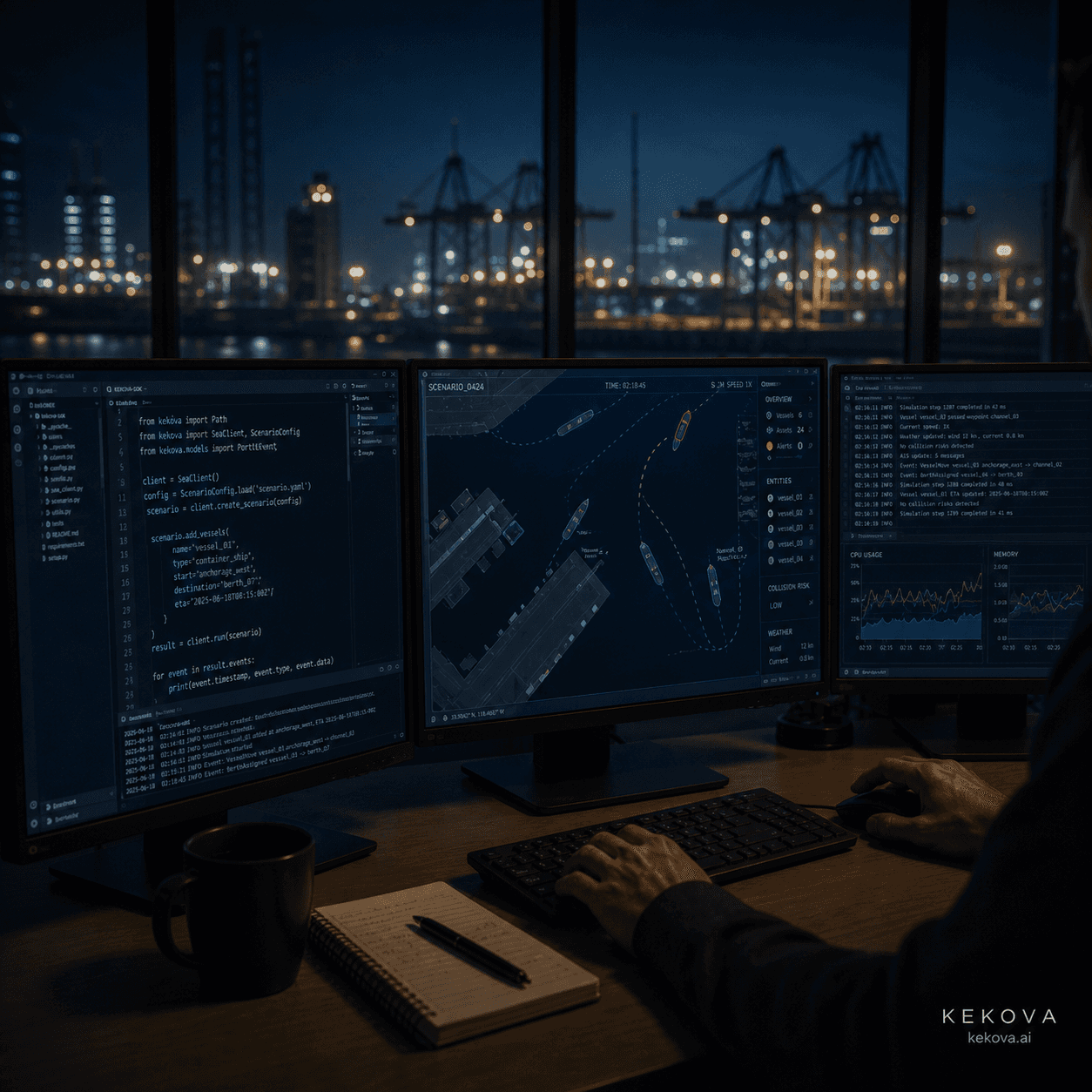
The customer-facing surface. An open SDK, a scenario framework grounded in real-port world models, a reproducible evaluation environment, and a decision engine. pip install kekova-sdk and build against the same world models, simulation, and FM inference that power KEKOVA’s deployments. Port operators integrate the decision engine for real-time situational intelligence and progressively autonomous coordination. Defense and logistics partners deploy in their own environments under the data and inference SLAs their missions require.
our customers
The platform serves three customer segments. Each consumes a different combination of layers, and each contributes to the data flywheel.
Autonomy Developers
Build, simulate, and validate maritime autonomy on the developer platform. World models, scenario framework, evaluation, FM inference.

Port Operators
Real-time decision support today, progressively autonomous coordination over time. Sensor infrastructure, world models, decision engine.
Defense and Logistics Partners
Live situational intelligence in mission environments. Full-stack deployment with the data and inference SLAs the mission requires.
Let's Get to Work
